1.利用坐标测量臂和激光跟踪仪的大尺寸测量能力,对传感器坐标系进行全局校准,提高校准的精度和效率。
2.针对大型回转体型面测量问题,根据柱坐标机的测量原理,研制了大尺寸回转体型面点坐标及形心轴线测量系统。
3.在下边的“最终坐标”对话框中输入你想得到的历元,并点击“计算”来显示坐标进动。
4.为了在SQL中表达点包容算法,该团队首先构建了一对函数来将经纬度坐标转换为数学上的X和Y平面坐标
5.将UTM 坐标转换为经纬度坐标
6.将经纬度坐标转换为UTM坐标需要使用StringlatLon2UTM(doublelatitude,doublelongitude)方法。
7.清单7包含了一些示例输出,包括一些经纬度坐标和对应的UTM坐标
8.UTM坐标到经纬度坐标的转换要比相反的转换过程容易一些。
9.结果:确定大脑原点为连合间径线的中点,以此建立坐标系,测得内囊及各部分形心的坐标值。
10.本课题所采用的是极大数目坐标法,这种方法对的汽车双横臂独立悬架空间位姿采用空间笛卡儿坐标和欧拉参数来描述和分析。
11.因为该区域是固定的,所以您总是可以找到X坐标轴的跨度(长度)和Y坐标轴的跨度(高度)。
12.忽略作物生长高度,建立了单目视觉条件下,从图像坐标系到作物生长平面坐标系的转换模型。
13.该算法采用相对坐标,将求解域从笛卡儿空间转换到相对坐标空间。
14.极坐标是关于r,θ的,用r,θ代替平面上一点的x,y坐标,是从原点到那一点的距离,,which,is,the,distance,from,the,origin,to,a,point,θ是由x轴逆时针旋转,而得到的夹角。
15.引入坐标关联的概念,将那些无序、零散的坐标点用物理、逻辑关系关联起来,使之成为有机的整体。
16.分析研究悬臂式三坐标划线仪横臂的挠曲变形,提出采用数值分析方法和计算机软件修正处理横臂变形误差,解决在横臂加长后因挠曲度变形给仪器坐标精度带来的影响。
17.记下像素坐标,因为在图像处理代码中将根据这些像素坐标来定位监测地区。
18.通过计算可以精确的确定数控加工过程中任意时刻蜗杆齿面任意点的坐标值,为精度检测提供标准值依据。
19.通过使偏心圆齿轮节曲线的极坐标方程的极角按整倍数缩小的方法获得了变形偏心圆齿轮节曲线的极坐标方程。
20.十进制坐标可通过一个六分仪和一个记时计确定,与此不同的是,必须通过计算才能确定UTM坐标。
21.举例介绍用双坐标系法计算弯桥的桩位坐标。
22.可以用极坐标代替直角坐标,来计算这个二重积分。
23.该方法仅需4对消隐点象面坐标便可线性求解出旋转矩阵,再用2个空间点坐标便可线性求解出平移矢量。
24.这些信息都包含着以经纬度表示的地理坐标信息,军区的坐标和区域。
25.捷联惯导系统利用相对导航坐标系角速度计算姿态矩阵,把雷体坐标系轴向加速度信息转换到导航坐标系轴向并进行导航计算。
26.这是一款三维测量设备,采用移动测量探头获取物体表面点的坐标。该坐标测量仪采用X-Y-Z网格坐标系统确定工作台方位。
27.以两架直升机吊运一个大型构件为研究对象,定义了惯性坐标系和各子系统的机体坐标系;
28.介绍了量程可变的线性坐标系统的坐标变换公式及其技巧。
29.利用此改进的SUSAN法精确提取方格模板角点的亚像素坐标,并通过预标定获得主点坐标;
30.提出了光笔式视觉坐标测量中被测特征点像面坐标的提取方法。
31.远程运动对象常选地平坐标系为导航系,短航程的对象可选切平面惯性坐标系为导航系。
32.在白车身制造尺寸质量控制过程中,主要采用样架、三坐标测量机(CMM)、在线三坐标测量机(OCMM)进行检测。
33.提出了在直角坐标系中用多段直线拟合曲线的方法,在极坐标系中用多段阿基米德螺线拟合曲线的方法。
34.在两相静止坐标系下对三相逆变器突加阶跃调制信号,采集在相同坐标系下的逆变器输出电压阶跃响应波形,基于此波形构建控制对象模型。
35.在B型超声机械扇形扫描成像当中,原始图像信号是以极坐标的形式输出的,对图像进行实时坐标变换和漏点插补是图像预处理所要解决的主要问题。
36.本文采用数字坐标旋转(CORDIC)算法将极坐标图像转化为直角坐标图像,并采用三次样条插值的方法对漏点进行弥补。
37.依据坐标系转换四元数与坐标系旋转角速度之间的关系,提出了基于视线角四元数序列的视线角速率自适应样条滤波算法。
38.也许你看不到这里的坐标,但是这里的坐标真的是根号3,根号。
39.用靶标上任意3个非共线特征点的三维坐标建立单位正交基,从而求得多视点云坐标系初始变换矩阵。
40.该算法对差值扩大法进行改进解决了工程图线段顶点坐标值相关性差的问题,通过修改线段端点的坐标值来嵌入水印信息。
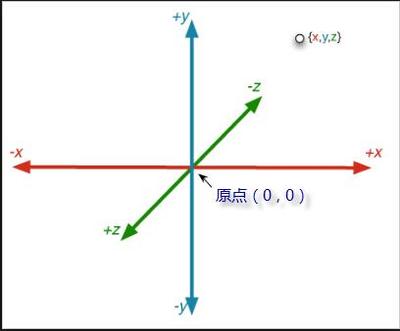
41.Java3D中,位置由x,y,z坐标描述,增加坐标值对于x轴来说是向右移动,y轴是向上,而z轴是向屏幕之外。
42.从包含图像标识符和文本的每个框中,将向地图中相关的坐标绘制一条直线。
43.然后,这个设备驱动程序的角色是每当出现中断时就查询触摸屏控制器,并请求控制器发送触摸的坐标。
44.一旦驱动程序接收到坐标,它就将有关触摸和任何可用数据的信号发送给用户应用程序,并将数据发送给应用程序(如果可能的话)。
45.与原始坐标点值清单所能提供的信息相比,图形可以告诉我们更多信息。
46.在这种情况下,必须先获得一个地图手柄,然后调用在此地图上获取坐标的API。
47.只要得到这些坐标,您就能创造性地发挥想象力,在2D地图和3D球体上覆盖文本和可视数据。
48.他发的电子邮件会告知发现时该天体的坐标,以便其他天文学家可以跟踪它。
49.为了避免这个问题,可应用一个SVG转换来调整所有坐标。
50.如果某个地址总是被解析为某个坐标时,需要编写该代码。
51.一个XPDL过程还可以在一个过程图中包含图形信息,如活动在过程图中的坐标。
52.在进行一些初始化之后,您可以将当前的坐标矩阵压入堆栈。
53.这些插入必须存储在内部且被应用到它们遇到的坐标。
54.在异常处理函数中,将一行插入错误日志表,这一行记录了时间和日期、原因编码、主键和坐标。
55.您可以固定编码按钮的坐标,但将会是不可靠的,因为尺寸大小会根据文本变化。
56.但是,您还需要知道对应于此项选择的几何坐标,这样您才能在每个方向上使用 “每个投影单元的像素 ”,如清单2 所示。
57.也可能取其中一个坐标。
58.对于数据数组中的每一行,提取图像中的精确像素坐标。
59.本教程还假设您了解地图的一些关键特性:距离、坐标和比例尺。
60.您可以自己执行这些修改,也可以使用提供的图像和坐标文件来填充各个州。
61.得到的结果将是,仅含一个参数的坐标。
62.在杆件坐标系下,基于齐次坐标变换对双足跑步机器人进行了正逆运动学的建模,为后续的步态规划奠定了基础。
63.非球面零位补偿检测中会引入非线性误差,利用光线追迹的方法获得了干涉测量坐标系和非球面镜面坐标系之间的非线性关系。
64.改进的方法是将激光三角测量头装在三坐标机上以代替触针,从而实现了非接触测量,但此法仍然受到三坐标机本身的限制。
65.并据此建立了异步电动机在三相坐标系和二相静止坐标系下的数学模型,后者用于直接转矩控制的研究。
66.昨天学习了直角坐标系下,以及柱坐标下的三重积分。
67.把一个函数,在直角坐标和极坐标中转换。
68.我们有直角坐标系,有柱坐标系和球坐标系。
69.本文提出了一种仅变换置镜点和后视点坐标而达到置镜任一点极坐标法测设整条曲线的方法。
70.该方法首先将激光点云数据经坐标投影和抽稀后作为无单元模拟的节点坐标数据;
71.在小目标远场情况下,极坐标格式算法(PFA)能够基本消除MTRC,这种算法需要在空间频域进行从极坐标分布到直角坐标分布的二维插值。
72.Y坐标:Y坐标是某一个点距离原点的纵向距离。
73.X坐标:X坐标是某一个点距离原点的水平距离。
74.第二句:发现颜色值后挪动到该颜色值右移2个坐标然后点击左键后回到原有坐标。
75.三坐标测量机是用测头来拾取瞄准测量信号,测头的功能、工作效率、精度与三坐标测量机密切相关。
76.我算过了钻孔的坐标,隐在了我的纹身里,然后把坐标重新投射回墙上。
77.如果有一条指令企图让机器人从一个格网坐标移出世界,然而之前已经有机器人从该坐标移出并损失,那么这条指令就应被忽略。
78.根据双通道控制旋转导弹的特点,通过旋转变换,将弹体坐标系下的自动驾驶仪回路变换到准弹体坐标系下,并比较了与倾斜稳定导弹标准自动驾驶仪的区别。
79.根据卫星星历和时间数据计算卫星在天球坐标系中的坐标。
80.这样,就能得知太阳在众星辰中的位置;也能够将太阳坐标与其他恒星的坐标联系起来 。
81.变形时先计算每一骨粒的新坐标,然后计算相应皮肤顶点的新坐标。
82.用Unisight软件在MPR相下获得各点原始三维坐标值,通过数学计算得到各测量点在测量三维坐标系下的坐标值。
83.您的第一个想法可能是使用label的父容器的localToGlobal,因为label的x和y 坐标都与它的父容器 box的x和y 坐标相对应。
84.该文导出了不同色度坐标下,色系数的相互转换关系,并在此基础上对给定的色度坐标进行了量化处理。
85.主要针对情报处理中极坐标数据转换成直角坐标数据之间的误差分析,给出了无偏转换公式。
86.有脱靶弹存在时,通过坐标变换可将弹着散布的概率密度函数用极坐标下的瑞利分布函数表示。
87.运用贴体坐标转换方程对其温度场控制方程进行离散和求解,生成了梯形区域物理平面的贴体网格,同时应用非正交曲线坐标系对任一角度的梯形区域的温度场进行模拟计算。
88.对采用坐标展点器展绘碎部点坐标所测绘的大比例尺地形图的精度进行了系统地分析,并定量地给出了采用不同测距方式展点测图的点位中误差。
89.该法根据仪器安置在测站上测算得到的碎部点坐标归算到以坐标方格网交点为坐标原点的坐标,应用有刻度的直角板展绘碎部点。
90.利用仿射坐标与射影坐标的映射关系,设计了一种有限素整数域上ECC快速算法,使得ECC在电子商务中实际安全应用成为可能。
91.详细推导了机器人平面手眼视觉系统变换关系,完成了从视觉平面坐标系到机器人参考坐标系的坐标变换。
92.叙述了复合曲线在路线测量坐标系中的三维坐标的一种计算方法及实例,以及利用全站仪进行路线测设的三维点位放样过程。
93.方法根据人工牙特征点来定义一个长方体,从而建立其人工牙坐标系,并采用三坐标测量仪进行特征点参数的测量。
94.本论文提出一种采用光学测棒的三目视觉坐标测量系统,利用交汇成像原理实现三坐标测量。
95.本文讨论了验后方差估计在单象空间后方交会中的应用。此时所要估计的是地面坐标和象片坐标的权。
96.建立起以“度”为单位的坐标系统和“1:50万”比例尺坐标系统的两套鲁西地区金矿评价信息数据库。
97.首先,介绍坐标平移和坐标旋转的齐次坐标变换概念;
98.建立以比卡鲁胺与尼莫地平峰面比值为纵坐标,相应对映体浓度为纵坐标的标准曲线。